Erweiterung eines Traxxas TQi 2,4 GHz-Systems um einen 16 Kanal Multiswitch
In diesem Beitrag möchte ich einmal meinen Traxxas Landrover Defender, die Aufrüstung der Anlage mit einem 16 Kanal-Multiswitchsystem und meine bisher umgesetzten Funktionen darstellen. Aufgrund der Eigenschaften der Anlage musste allerdings ein – im Vergleich zu anderen Anlagen – langsameres Übertragungsverfahren verwendet werden, so dass die Übertragung der 16 Schaltfunktionen so ca. 800ms benötigt. Das ist eine merkbare Zeit, die aber beim Schalten von z.B. Lichtfunktionen keine eigentliche Rolle spielen sollte.

Foto meines Senders
Bisher wurden die folgenden Funktionen realisiert:
-
Verschiedene Beleuchtungsmodi (Tagfahrlicht, Standlicht, Abblendlicht, Fernlicht)
-
Hellere Rücklichter (Bremsleuchten) beim Abbremsen des Modells
-
Anschalten der Rückfahrscheinwerfer bei Rückwärtsfahrt
-
Abschaltbare Blinker bzw. beidseitige Aktivierung als Warnblinklichtes
-
Unterflurbeleuchtung (Rocklights) separat einschaltbar in verschiedenen Farben und Modi
-
Zuschaltbare Lightbar (Such-Scheinwerfer)
-
Steuerbare Winde
Wie man ja schon aus den Beschreibungen der anderen Elektroniken sehen kann, muss ein Modell bei mir zumindest mit ein paar Sonderfunktionen ausgestattet werden. Bei einem Automodell ist das bei mir normalerweise mindestens ein Fahrlicht, damit die Position und Ausrichtung des Modell auch bei Dämmerung zu erkennen ist. Folglich sollte mein Landrover Licht verpasst bekommen, das ich natürlich per dazugehörigem Sender ein- und ausschalten wollte.
Nach Erst-Inbetriebnahme der Anlage stellte sich aber nun heraus, dass alle Kanäle des Senders bereits durch die normalen, erweiterten Fahrfunktionen (inkl. Der beiden Differentialsperren-Servos und des Servos zum Umschalten der beiden Geschwindigkeitsstufen) vollständig ausgenutzt waren. Vorhandene Erweiterungssets wie Lichtmodule oder die Ansteuerung einer nachrüstbaren, funktionsfähigen Winde verfügen dann zumeist über ihre eigenen kleine Fernbedienungen. Alternativ könnte man natürlich auch einen „historischen“ Weg gehen und das Licht durch einen Zweikanalschalter einschalten, der parallel zum Lenkservo angeschlossen werden würde. Eine z.B. zweimalige schnelle Lenkbewegung nach Rechts würde das Licht ein- und auch wieder ausschalten. Das wäre aber nur die allerletzte Option gewesen - ein Multiswitchsystem ist hier natürlich wesentlich komfortabler.
Durch verschieden Eigenschaften der Anlage konnte kein Standard-Multiswitchsystem verwendet werden. Daher habe ich ein System entwickelt, das zwei digitale Kanäle (Kanal 4 und 5; beide Differentialsperren) zur Übertragung verwendet. Natürlich möchte ich auf die Funktion der Differentialsperren nicht verzichten, so dass diese Funktion dann über zwei Schalter des Multiswitchsystems umgesetzt ist.
Multiswitch-Encoder (Gehäuse und Sender-Elektronik)
Das Gehäuse hat mein Sohn per 3D-Software entwickelt - mit vielen Rundungen um es dem Sender gleichzutun. Gedruckt wurde es mit unserem eigenen 3D Drucker und ABS-Filament. Es besteht aus zwei Teilen und wird am Sender befestigt indem es den „Griff“ der Anlage umfasst. Eine Verschraubung mit der Anlage existiert nicht.
Um eine größtmögliche Flexibilität bei der Ansteuerung der Funktionen zu haben, verwende ich bei meine Standard-Encodern eigentlich nur Zweiwegetaster und keine Ein/Aus-Schalter oder Zweiwegeschalter. Ob es sich bei der anzusteuernden Funktion um eine Tast- oder Memoryfunktion handelt, wird dann am Decoder per Kurzschlussbrücke programmiert. Da ich bei diesem Modell aber die Positionen der Differtialsperren beider Servos sehen wollte und weiterhin einen „harten“ Umschalter der Blinklichtansteuerung umsetzen wollte, habe ich mich entschieden zwei Ein/Aus-Schalter und einen Zweiwegeschalter im Encoder zu verbauen.
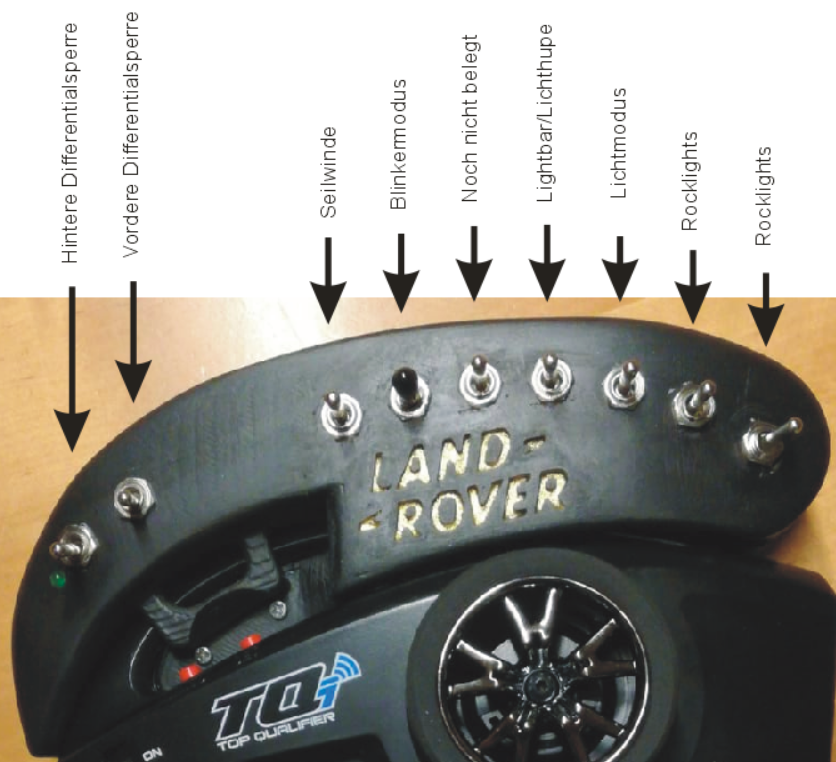
Taster/Schalter des 16 Kanal MS-Encoders und ihre Funktionen
Die elektrische Verbindung der Encoder-Elektronik (Stromversorgung und Spannungsvorgaben an die Kanäle 4 und 5) erfolgt über vier Litzekabel durch das Loch des ausgebauten Zweiwegeschalters für die Differtialsperren. Drei Kabel werden anstelle dieses Dreiwegeschalters angelötet, das vierte geht an ein Lötpad des Traxxas-Link Steckplatzes. Ein Rückbau der Anlage wäre somit ohne sichtbare Spuren möglich.
Zur Visualisierung der Funktion des Encoders habe ich noch eine LED verbaut, die im Takt der Übertragung der 16 Schalterpositionen blinkt.
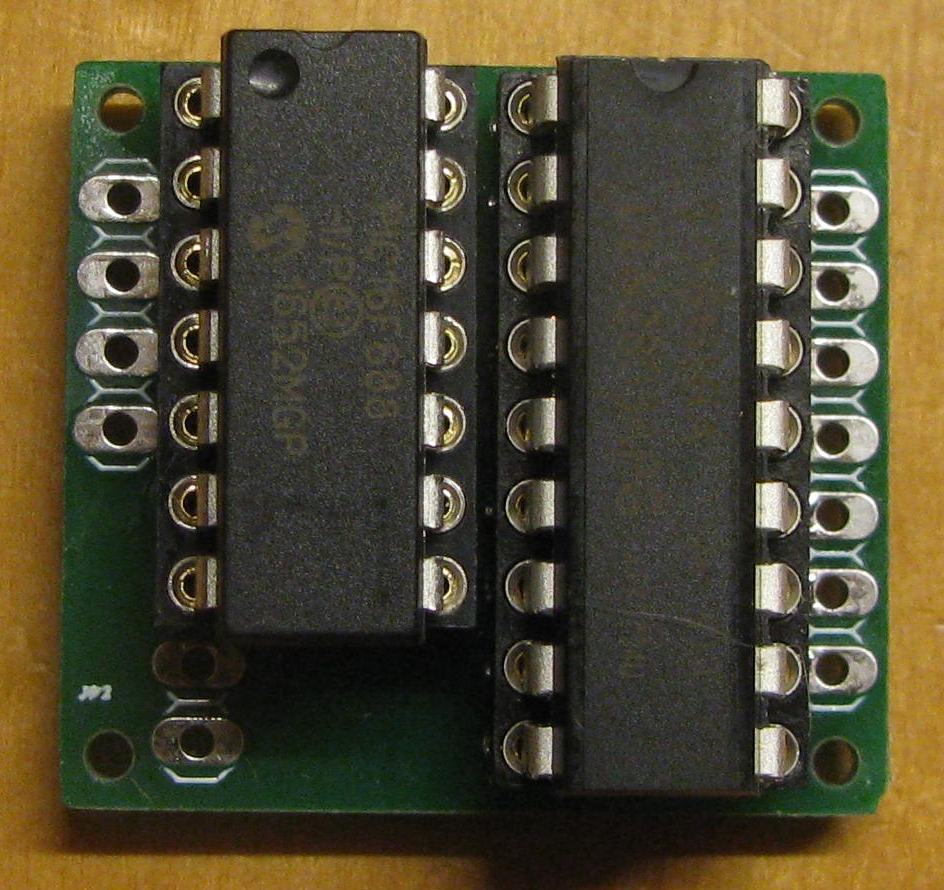
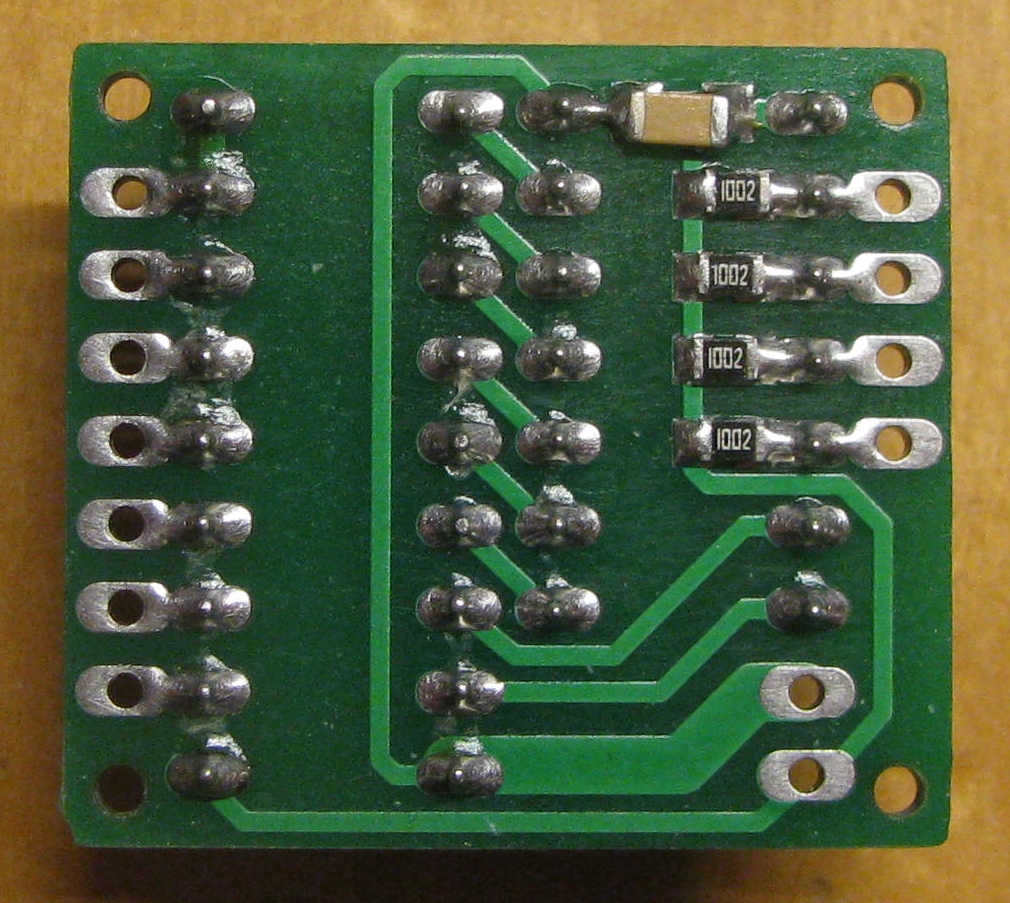
Multiswitch-Decoder (Elektronik im Modell; Verwendung eines 28-poligen PIC 16F883)
Um genügend Ein- und Ausgänge zur Verfügung zu haben, habe ich beim Encoder einen PIC Typ 16F883 verwendet. Wie zu erkennen ist, befinden sich auf der linken Seite die beiden Anschlüsse zum Empfänger. Durch diese erfolgt die Spannungsversorgung des Mikrocontrollers, die 5V nicht wesentlich überschreiten sollte.
Auf der rechten Seite befinden sich über mehrere dreipolige Stiftleisten die Anschlüsse für die 16 Verbraucher sowie ein Anschluss einer separaten Spannungsversorgung für die angeschlossenen Verbraucher. Diese muss durch die verbauten Treiberstufen (zwei ULN2803; ca. 100mA/Ausgang bei acht aktiven Ausgängen und 500mA bei nur einem aktiven Ausgang) allerdings für alle Verbraucher gleich sein, z.B. 12V. Ich habe die 5V eines zusätzlich verbauten BECs verwendet.
Weiterhin existiert eine zweipolige Stiftleiste über die man den Ausgängen nach eigenem Ermessen eine Memoryfunktion zuweisen kann.
An dieser Stelle möchte ich darauf hinweisen, dass alle mir bekannten – wie auch meine eigenen Entwicklungen – Multiswitchdecoder nur Minus (0V, Masse; - bei Zweikanal-Schaltern gibt es hingegen Exoten). Das „Plus“ eines am Decoder angeschlossenen Akkus, der für die Leistungsversorgung der Verbraucher da ist, wird direkt wieder auf die normalerweise vorhandenen Plus-Kontakte der Verbraucheranschlüsse des Decoders gegeben. Daher könnte man mit einem Multiswitchsystem auch Verbraucher ein- und ausschalten ohne das „Plus“ des Akkus auf den Decoder zu führen indem man die Verbraucher direkt an den Pluspol des Akkus anschließt. Allerdings beinhalten die Endstufen der Decoder auch Schutzdioden, die benötigt werden wenn man z.B. Relais mit dem Decoder schaltet, so dass bei solchen Verbrauchern wiederum eine Verbindung zwischen Akku und Decoder dringend notwendig ist.
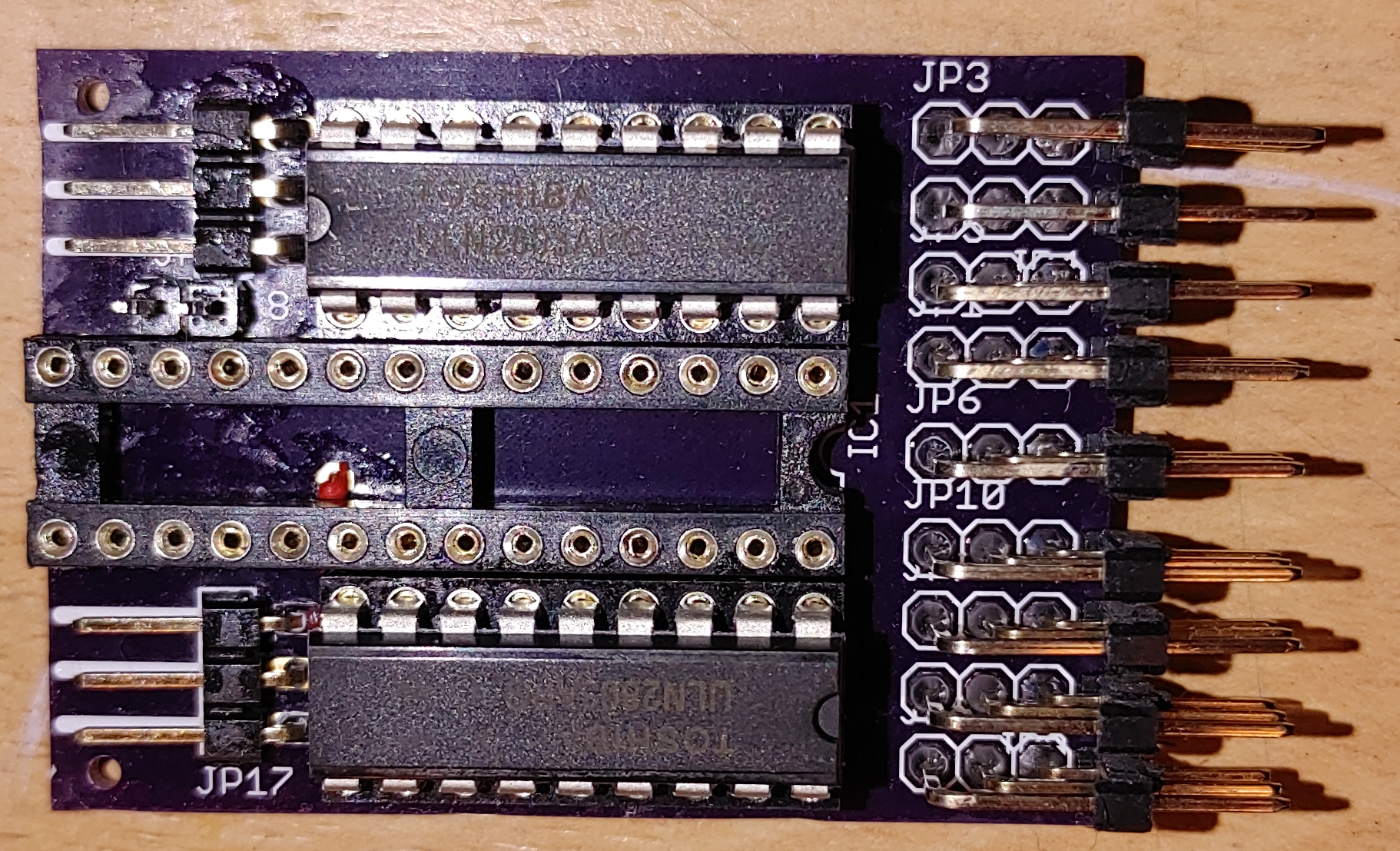
16 Kanal MS-Decoder für den Traxxas (hier ohne PIC)
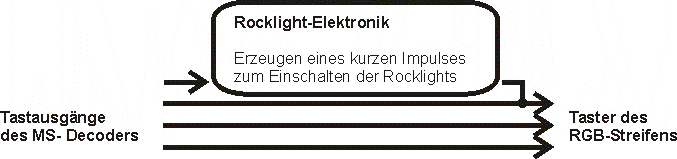
Umgesetzte Funktionen und Strukturplan
Bei der Umsetzung der einzelnen Funktionen favorisiere ich persönlich ein modulares System aus mehreren Einzelelektroniken anstelle einer zentralen Steuereinheit. Entsprechend habe ich verschiedene Elektroniken entwickelt, die im folgenden noch kurz beschrieben werden.
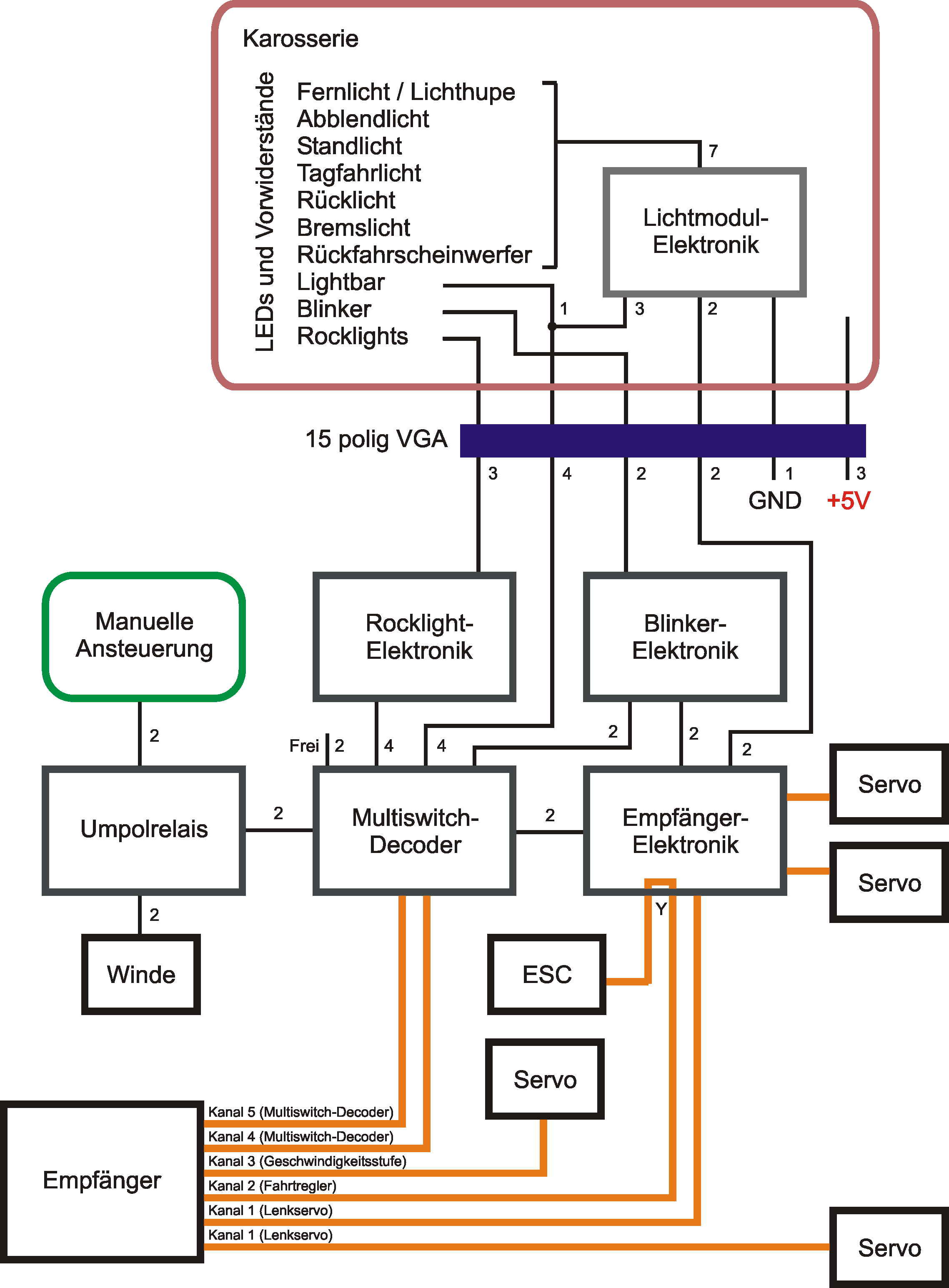
Strukturplan der Signalverkabelung (die orangenen Verbindungen sind Servokabel)
Warum bin ich nun bei der Beschreibung des Multiswitchdecoders auf das geschaltete „Minus“ eingegangen: Da der Decoder somit also nur Minus schaltet, ist ein – im Vergleich zu den Verbraucheranschlüssen – größere Kabelquerschnitt zwischen dem Minus des Akkus und dem Minusanschluss des Decoders notwendig, weil im Kabel zum Akku ja die Stromstärke für alle aktiven Verbraucher auftritt während durch einen geschalteter Ausgang nur den Strom des dort angeschlossenen Verbrauchers fließt. Aus diesem Grund habe ich, wie im Strukturplan der Signalverkabelung ersichtlich, für „Plus“ drei Kontakte des 15 poligen Steckkontaktes zwischen Fahrwerk und der Karosserie verwendet während für ein – nicht geschaltetes - „Minus“ nur eine Kontakt verwendet wird. Dieses „Minus“ ist lediglich für die Spannungs-/Stromversorgung der Lichtmodul-Elektronik und der an dieser Elektronik angeschlossenen LEDs da. Blinker, Rocklights und die Lightbar erhalten ihr „Minus“ über die Elektroniken im Fahrwerk.
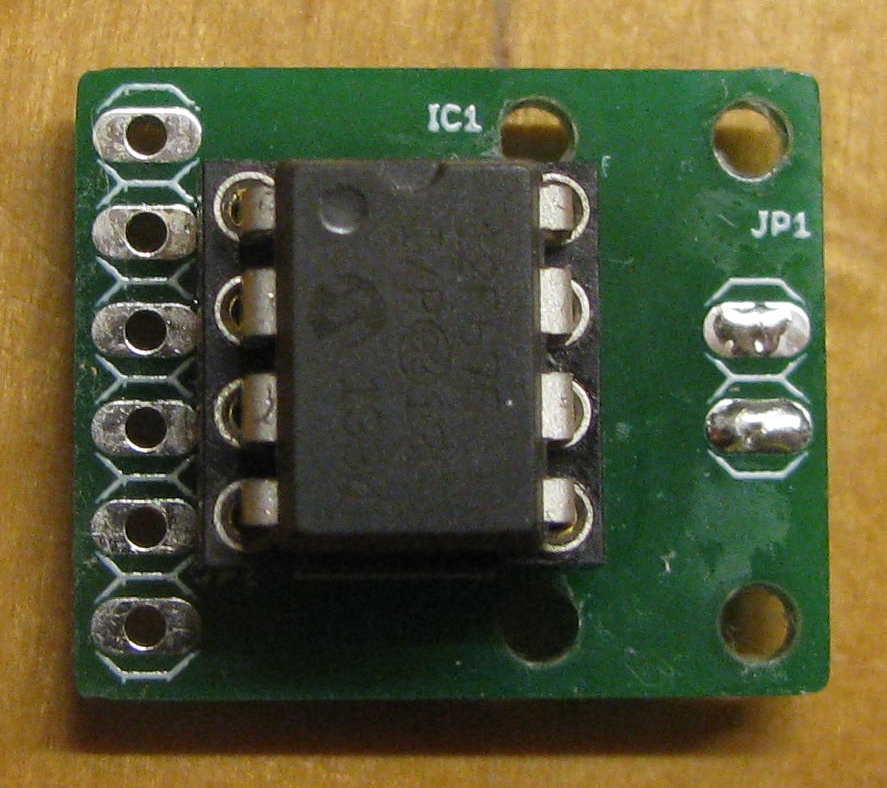
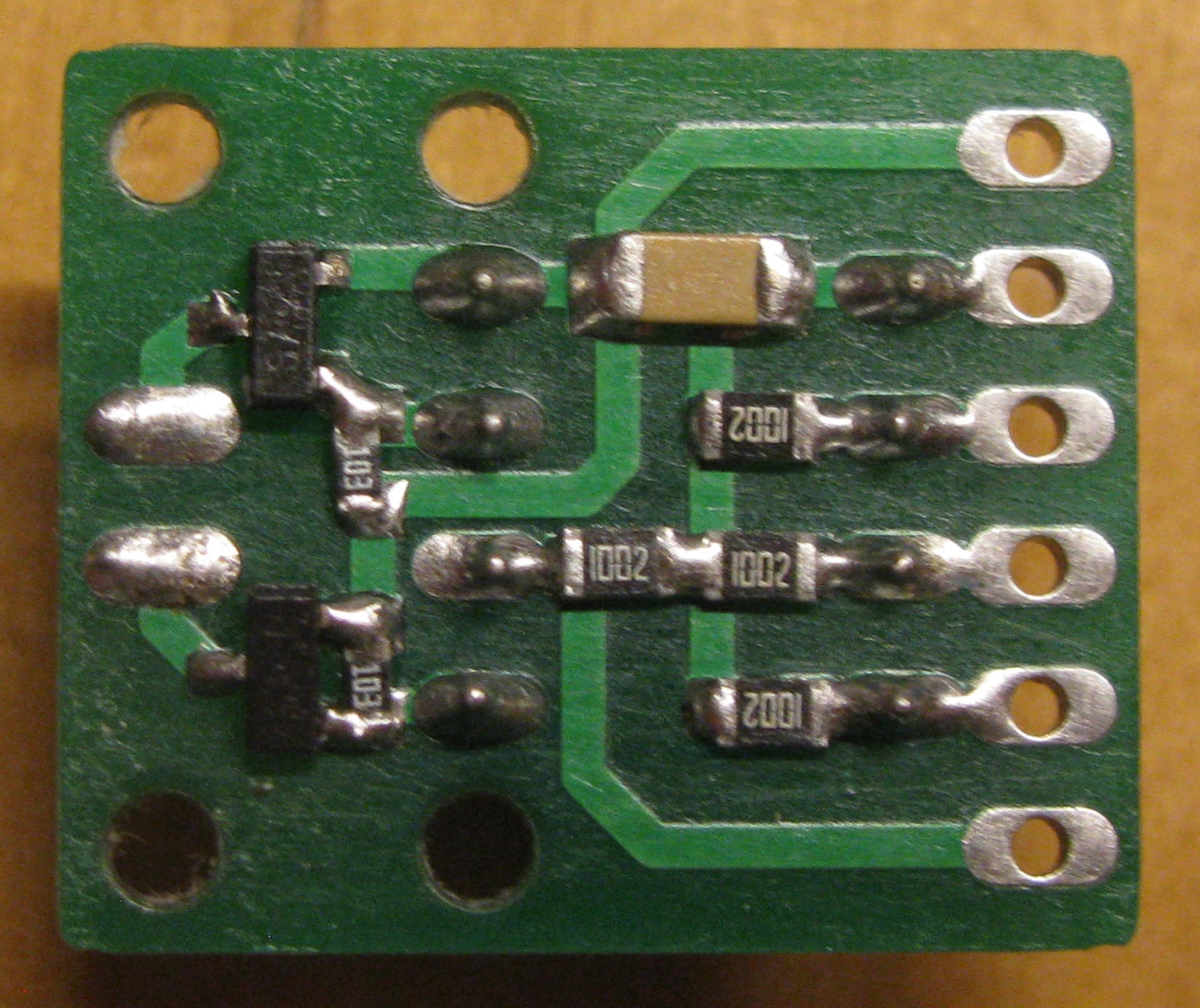
Empfänger-Elektronik (Verwendung eines 14-poligen PIC 16F688)
Diese Elektronik verarbeitet die Fahrkanäle 1 und 2. Für Kanal 1 (Lenkung) ist ein zweiter Abgriff am Empfänger vorhanden. Kanal 2 (ESC/Fahrtregler) wird vom Empfänger abgegriffen und ein weiterer Anschluss dient zum Anschluss des Fahrtreglers (quasi als Y-Kabel). Die Elektronik hat zwei Aufgaben:
Zum einen ermittelt sie anhand der Fahrfunktionen ob nach links oder rechts gelenkt wird (hier gibt es einen gewissen „Totbereich“) und gibt diese Information über zwei Litzekabel an die Blinker-Elektronik weiter. Auf ähnliche Weise berechnet sie ob die Ansteuerung des Gashebels zu einem Bremsvorgang oder einer Rückwärtsfahrt führt. Beide Informationen werden ebenfalls über zwei Litzekabel an die Lichtmodul-Elektronik gegeben.
Zum anderen erzeugt sie pulsweitenmodulierte Signale (PWM-Signale) für die beiden Differntialsperren-Servos, deren Ansteuerung durch die Verwendung von Kanal 4 und 5 ja weggefallen ist. Da die Anschlusskabel der Servos aufgrund des ursprünglichen Anschlusses am Empfänger in der wassergeschützten Empfängerbox liegen, habe ich mich entschlossen die Signalerzeugung für diese Servos auch dieser Elektronik zu übergeben (in einer früheren Umsetzung war dafür eine eigene Elektronik zuständig). Jedes Differntialsperren-Servo wird in zwei feste Positionen betrieben. Die Anforderung, welches Signal nun pro Servo erzeugt werden soll, kann somit unmittelbar über zwei weitere Litze-Kabel durch zwei digitale Schaltausgänge des Multiswitch-Decoders erfolgen.
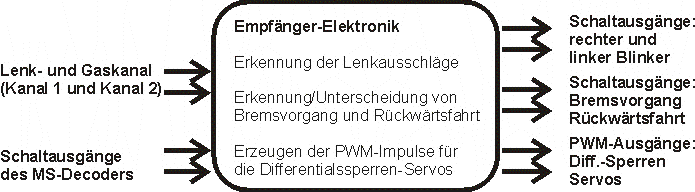
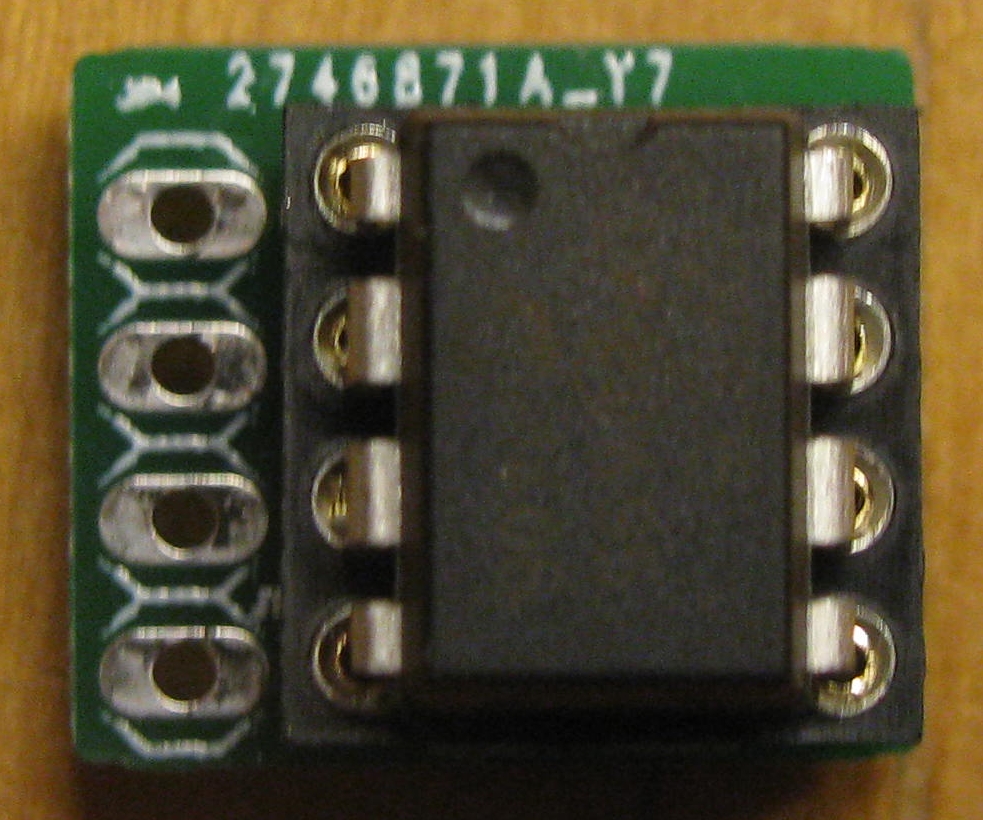
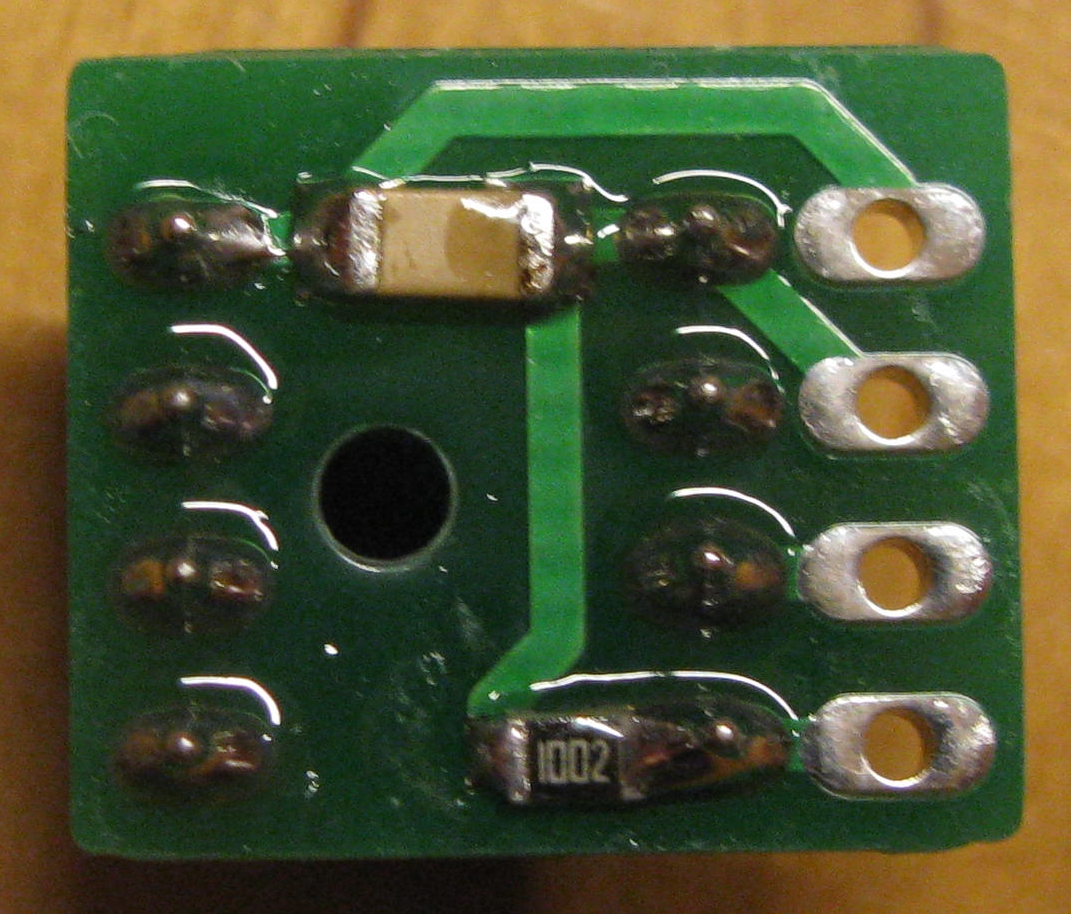
Empfänger-Elektronik
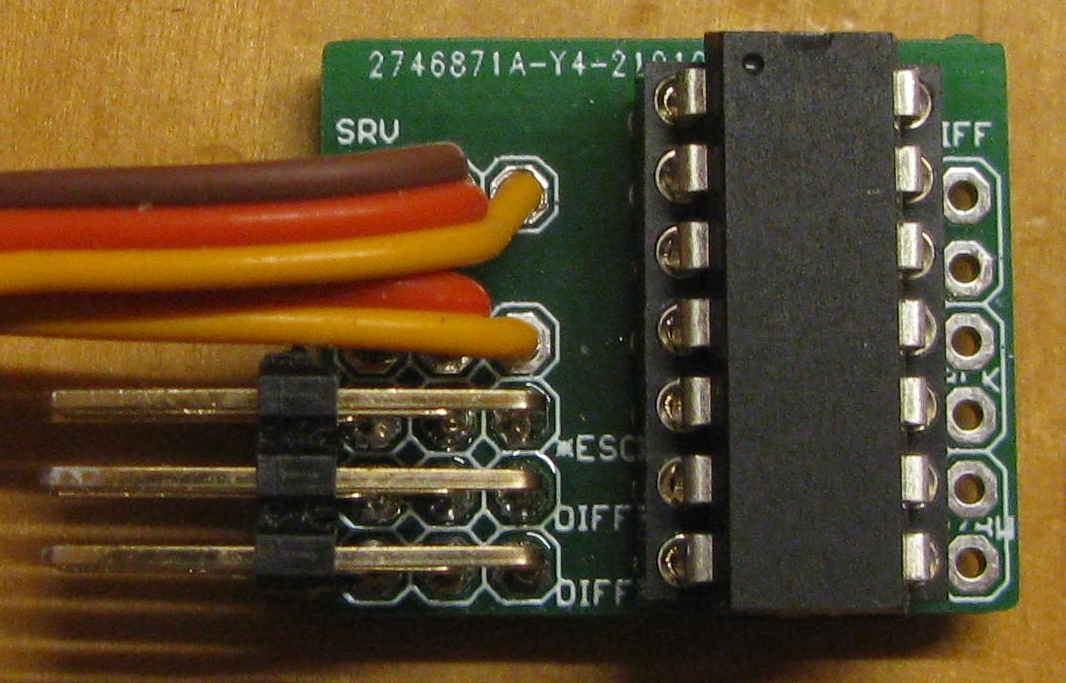
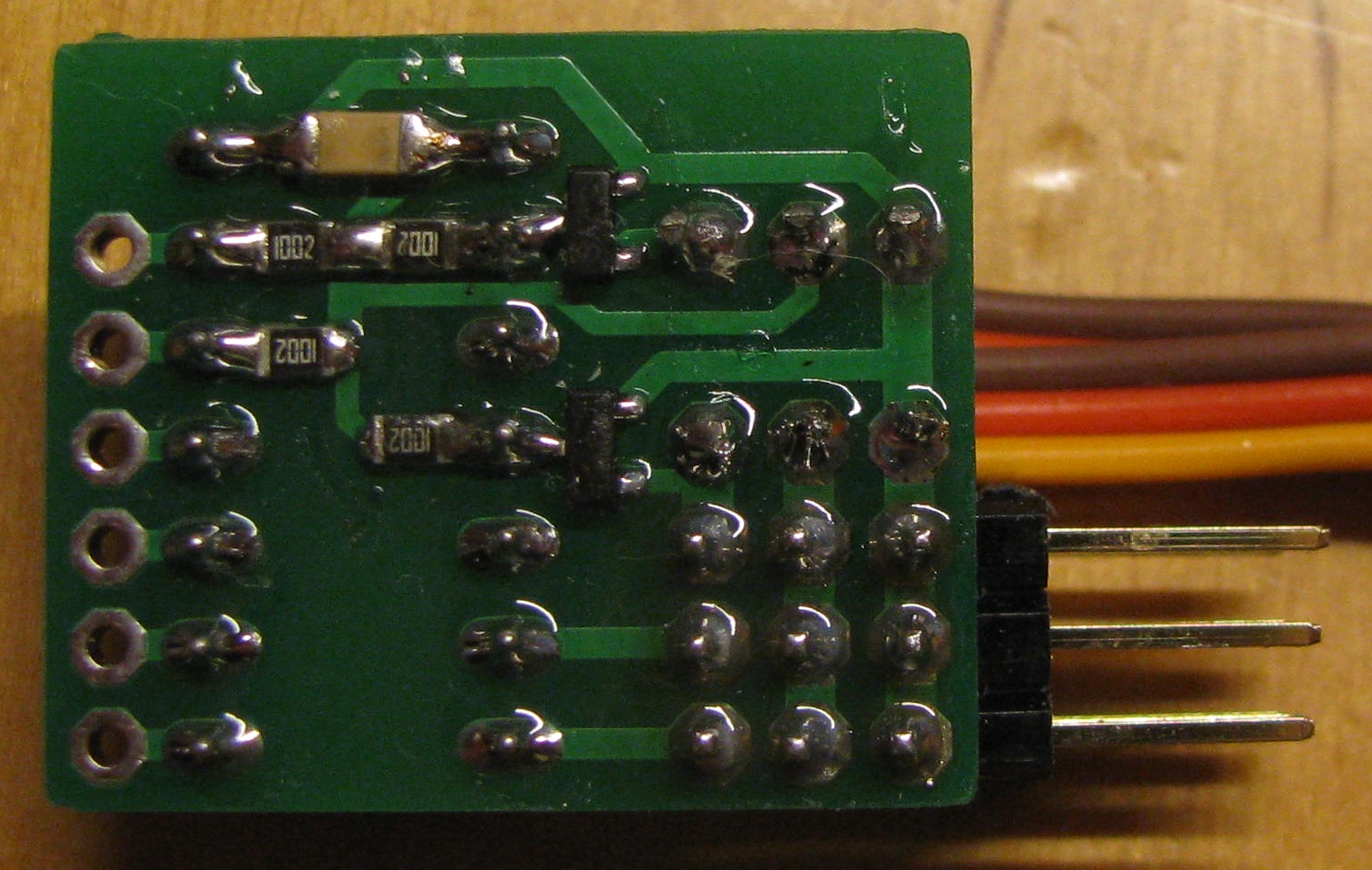
Bilder der Empfänger-Elektronik:
Blinker-Elektronik (Verwendung eines 8-poligen PIC 12F675)
Hauptgrund für eine Entwicklung dieser Elektronik war der Umstand, dass ich die Blinker auch deaktivieren wollte. Beim Rangieren im Gelände sollte der Landrover nicht ständig links oder rechts blinken.
Die eigentliche Information ob sich das Lenkrad außerhalb des Neutralbereichs befindet, erhält die Elektronik über zwei Eingänge von der Empfänger-Elektronik. Über zwei weitere digitale Eingänge vom Multiswitch-Decoder wird nun die Art der Ausgabe der Lenkinformation festgelegt. Während der eine Eingang das Blinken verhindert (Rangieren im Gelände), aktiviert der andere Eingang das zeitgleiche Blinken der rechten und linken Blinker – somit enthält man ein Warnblinklicht.
Das Blinken selbst erfolgt natürlich für den rechten und den linken Blinker auf zwei separaten Ausgängen, denen Transistoren als kleine Leistungstreiber nachgeschaltet sind um sich nachgelagerte Treiberstufen für je nur zwei LEDs zu sparen (ein Ausgang eines PICs kann leider nur 20mA treiben, was ohne zusätzliche Treiberstufe gerade mal für eine Standard-LED ausreicht).
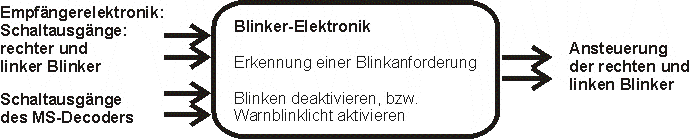
Blinker-Elektronik
Bilder der Blinker-Elektronik:
Rocklight-Elektronik (Verwendung eines 8-poligen PIC 12F675)
Die Basis der Rocklight-Beleuchtung ist ein 5V LED-Streifen mit RGB-LEDs zurückgegriffen. Einen solchen Streifen habe ich bereits in einem Schiffsmodell im Einsatz und je nach Farbe bzw. Farbwechselmodus lassen sich recht schöne Effekte erzielen. Einen solchen Streifen gibt es mit verschiedenen Infrarot-Fernbedienungen aber auch mit einer direkten, manuellen Ansteuerung über 3 Tasten, die preisgünstigste Variante.
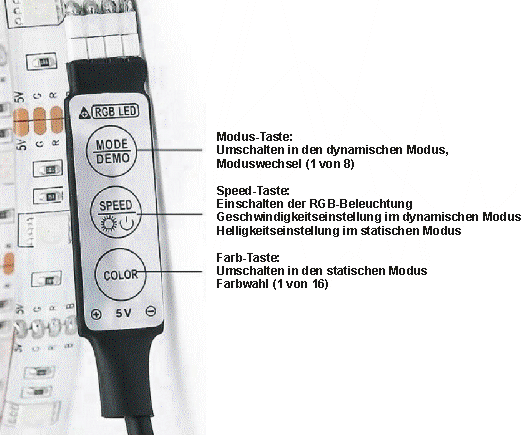
Verwendeter RGB LED-Streifen und zugehörige Elektronik
Da jeder dieser Taster einen Anschluss des eingebauten kleinen Mikrocontroller nach Masse (oV, Minus) zieht, eignet sich diese Elektronik perfekt um mit einem Multiswitch angesteuert zu werden, da auch dieser zum Einschalten eines Verbrauchers lediglich dessen Minusanschluss mit dem Minus des Akkus verbindet – Plus liegt dagegen ständig am Verbraucher an. Entfernt den Schrumpschlauch und die kleinen Taster, die lediglich aus dünnen Blechen bestehen, die mit einem Klebestreifen über den jeweiligen Kontakten in Position gehalten werden, so kann man leicht drei Kabel an den Tasteingängen anlöten.
Während dieses System aus RGB-Streifen und Standard-Multiswitchsystem in meinem Schiffsmodell ohne Probleme funktioniert, gab es hier aber ein Problem: die Schaltverzögerung von 800ms (diese Zeit tritt beim Ein- aber auch beim Ausschalten auf) sorgte dafür, dass sich die RGB-Beleuchtung zwar einschaltete, das längere Tastendruck von 800ms führte aber nach ca. 500ms wieder zum Ausschalten der Beleuchtung. Daher musste ich eine weitere kleine Elektronik vorschalten, die beim Schalten eines Multiswitchkanals nur einen kurzen Einschaltimpuls von 100ms erzeugt.
Rocklight-Elektronik
Bilder der Rocklight-Elektronik:
Seilwinde (Elektronik und manuelle Ansteuerung)
Um den Motor der Seilwinde mit einem Multiswitch-Decoder, dessen Ausgänge nur nach Minus schalten, in beide Richtungen drehen zu lassen, habe ich eine kleine Relaisplatine mit zwei Relais verbaut. Wird einer der zwei Ausgänge des MS-Decoders geschaltet, so zieht eines der Relais an und legt eine der gewünschten Drehrichtung entsprechenden Polarität an die Anschlüsse des Windenmotors.
Durch die bereits mehrfach genannte Verzögerung von ca. 800ms, was insbesondere beim Einholen des Windenhakens problematisch sein kann, da die verbaute Winde nicht abschaltet, sollte der Haken über den Multiswitch-Decoder aber nicht zu weit eingeholt werden. Um trotzdem eine Möglichkeit zu haben die Winde feinfühliger zu bedienen, habe ich einen Zweiwegetaster am Modell verbaut, der parallel zu den Steuerleitungen des MS-Decoders an die beiden Eingänge des Relaismoduls angeschlossen ist und über den ich ebenfalls „Minus“ auf einen dieser beiden Anschlüsse aufschaltet kann.
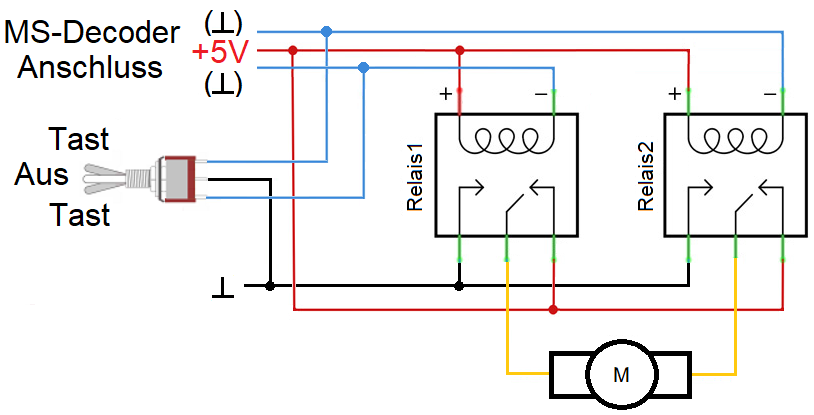
Schaltplan für die Windensteuerung
Lichtmodul-Elektronik (Verwendung eines 20-poligen PIC 16F690)
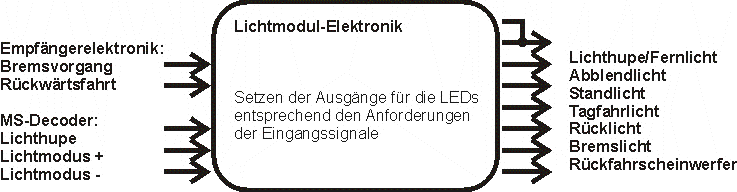
Neben der Aufgabe des Lichtmoduls mit einem Ausgangstreiber (ebenfalls ein ULN 2803) den notwendigen Strom für mehrere LEDs pro Ausgang zur Verfügung zu stellen, besteht die Hauptaufgabe die verschiedenen Ausgänge (LEDs der Fahrbeleuchtung) auf Grundlage der Eingänge logisch zu verknüpfen und zu schalten.
Die Lichtmodul-Elektronik befindet sich nach dem Einschalten im Modus „Tagfahrlicht“. Entsprechend werden lediglich mehrere LEDs in den Hauptscheinwerfern angeschaltet. Erhöht man diesen Modus über das Betätigen eines Tasters des Multiswitch-Encoders (Lichtmodus+), so wird das Tagfahrlicht abgeschaltet und die Standlichter an der Front des Fahrzeugs sowie die Rücklichter am Heck angeschaltet. Die Beleuchtung der Rücklichter erfolgt hierbei nicht in voller Helligkeit. Eine weitere Erhöhung des Lichtmodus führt zum Abschalten der vorderen Standlichter und zum „gedimmten“ Zuschalten der Hauptscheinwerder als Abblendlicht. Eine erneute Erhöhung des Lichtmodus führt dann zum Einschalten des Fernlichtes – die Hauptscheinwerfer werden mit einem höheren Strom betrieben. Da in den Hauptscheinwerfern leistungsstarke LEDs verbaut sind, habe ich zur Ansteuerung dieser LEDs zwei Treiberausgänge zusammengeschaltet und parallel verwendet.
Unabhängig vom Lichtmodus werden weitere Beleuchtungsoptionen dazugeschaltet. So bewirkt die Betätigung der Lichthupe (weiterer Tastkanal am Multiswitch-Encoder) ein nur kurzfristiges Anschalten der Hauptscheinwerfer mit maximal Leistung. Wird von der Empfänger-Elektronik ein Bremsvorgang erkannt, so wird das Rücklicht in maximaler Helligkeit angeschaltet. Das ist auch der Grund warum die gleichen LEDs, die in mehreren Lichtmodi als ständig leuchtendes Rücklicht dienen, in diesen Modi nur mir reduzierter Helligkeit betrieben werden. Weiterhin führt die Erkennung einer Rückwärtsfahrt zum Einschalten der Rückfahrscheinwerfer. Auch ja: der Rückfahrscheinwerfer? Ich habe hinten rechts und links einen Rückfahrscheinwerfer verbaut. Ein Original-Landrover hat aber wohl nur hinten rechts einen solchen Scheinwerfer, während sich auf der anderen Seite die Nebelschlussleuchte befindet. Auch diese könnte man natürlich realisieren. Das von mir verwendete LED-Scheinwerferset hatte in den betreffenden Lampen (rechts wie links) rote LEDs verbaut, die entsprechend durch weiße LEDs ersetzt werden mussten. Da ich nicht vor habe mein Modell bei Nebel zu fahren und der rechte Rückfahrscheinwerfer teilweise durch den Wagenhaber verdeckt wird, habe ich mich entschieden beide Lampen als Rückfahrscheinwerfer zu betreiben.
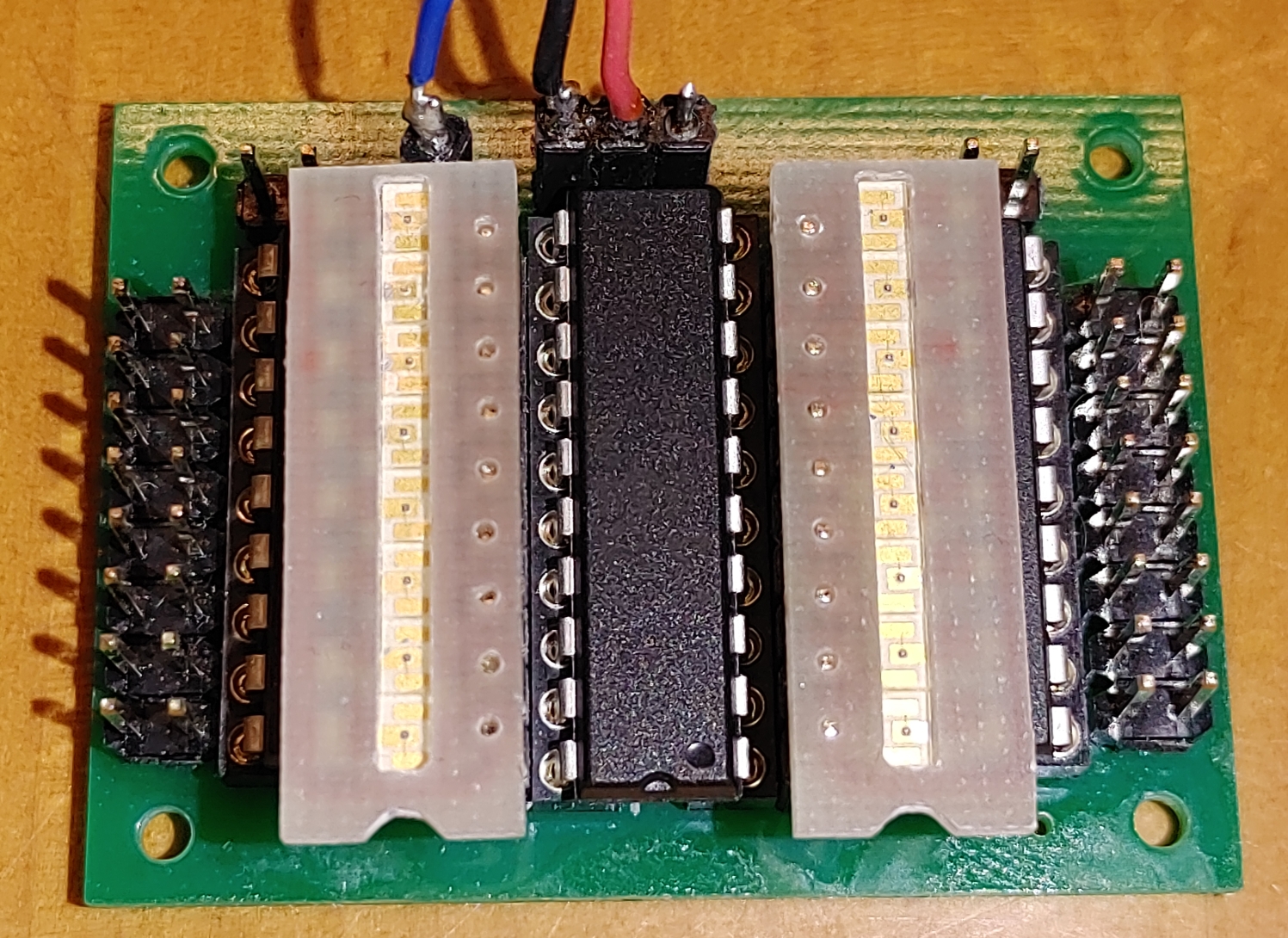
Lichtmodul-Elektronik
Bilder der Lichtmodul-Elektronik:
Die Verschaltung der LEDs, die mit verschiedenen Helligkeiten betrieben werden, erfolgte nach dem folgenden Schema. Die Widerstände sind hier (bis auf den Hautscheinwerfer so zu bestimmen, dass der Gesamtstrom durch die LED nicht großer 2mA (Low-Current-LED) bzw. 20mA (Standard-LED) wird (einzustellen über R1). Wenn man kein Datenblatt der verwendeten LED zur Hand hat, ist die Wahl des UNBEDINGT benötigten Vorwiderstandes leider immer problematisch. Ich habe mir hier zwei Beleuchtungssets für den Traxxas bestellt (nur die Platinen mit den LEDs) und ein Set quasi zum Testen verwendet.
R2 kann dann je nach belieben so gewählt werden, dass die LED mit einer gewünschten Helligkeit leuchtet wenn lediglich die – in der Grafik – untere Treiberstufe in Betrieb ist.
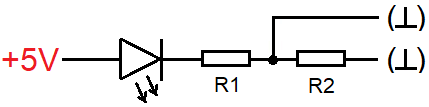
Ansteuerung der LEDs, die mit zwei Helligkeiten betrieben werden
Letzte Änderungen
Um die Anzahl der Kabel zwischen Fahrwerk und Karrosserie extrem zu reduzieren, habe ich in einem aktuellen Testsystem eine Einleiterkommunikation zwischen dem Multiswitch-Decoder im Fahrwerk und dem Lichtmodul in der Karosserie realisiert. Dadurch war es möglich die Karosserie lediglich mit drei Kabeln mit dem Fahrwerk zu verbinden. Eine ebenfalls mögliche Realisierung per Funkstrecke, also eine kabellose Übertragung habe ich nicht umgesetzt, da ich einen zweiten Akku in der Karosserie als unpraktisch ansehe.
Der Multiswitch-Decoder wurde somit auf nur 8 Ausgänge umgebaut. Die entfallenen 8 Schaltausgänge dienen nun als Eingänge der Empfängerektronik (7 EIngänge, von denen aktuell nur vier verwendet werden) und dem Kommunikationsausgang. Das Lichtmodul benötigt entsprechend weitere Ausgänge, da nun auch Funktionen wie die Blinker-, Lightbar- und Rocklight-Ansteuerung übernommen werden. Zum Einsatz kam ein "normaler" 16 Kanal-Multiswitch-Decoder, der natürlich ein neues Programm verpasst bekam.
Im Gegensatz zum zuvor beschriebenen System in dem der Multiswitch-Decoder mit seinen 16 Schaltausgängen lediglich die 16 Funktionen (Taster/Schalter) des Multiswitch-Encoders ausgegeben hat und jede Funktion quasi identisch war, ist mit dem neuen System eine feste Zuordnung der Schalter im Sender mit der Funktion im Modell verbunden. So wird z.B. die Funktion des Schalters, der den Modus des Blinkers steuert (Blinker deaktiviert/aktiviert oder Warnblinklicht) nun nicht mehr vom Decoder selbst per Schaltausgänge ausgegeben, sondern mit den Daten der Empfängerelektronik verschnitten und dann die Information ob der rechte und/oder linke Blinker aktiviert ist, per Einleiterkommunikation an das Lichtmodul gesendet und dann von dieser Elektronik ausgegeben.
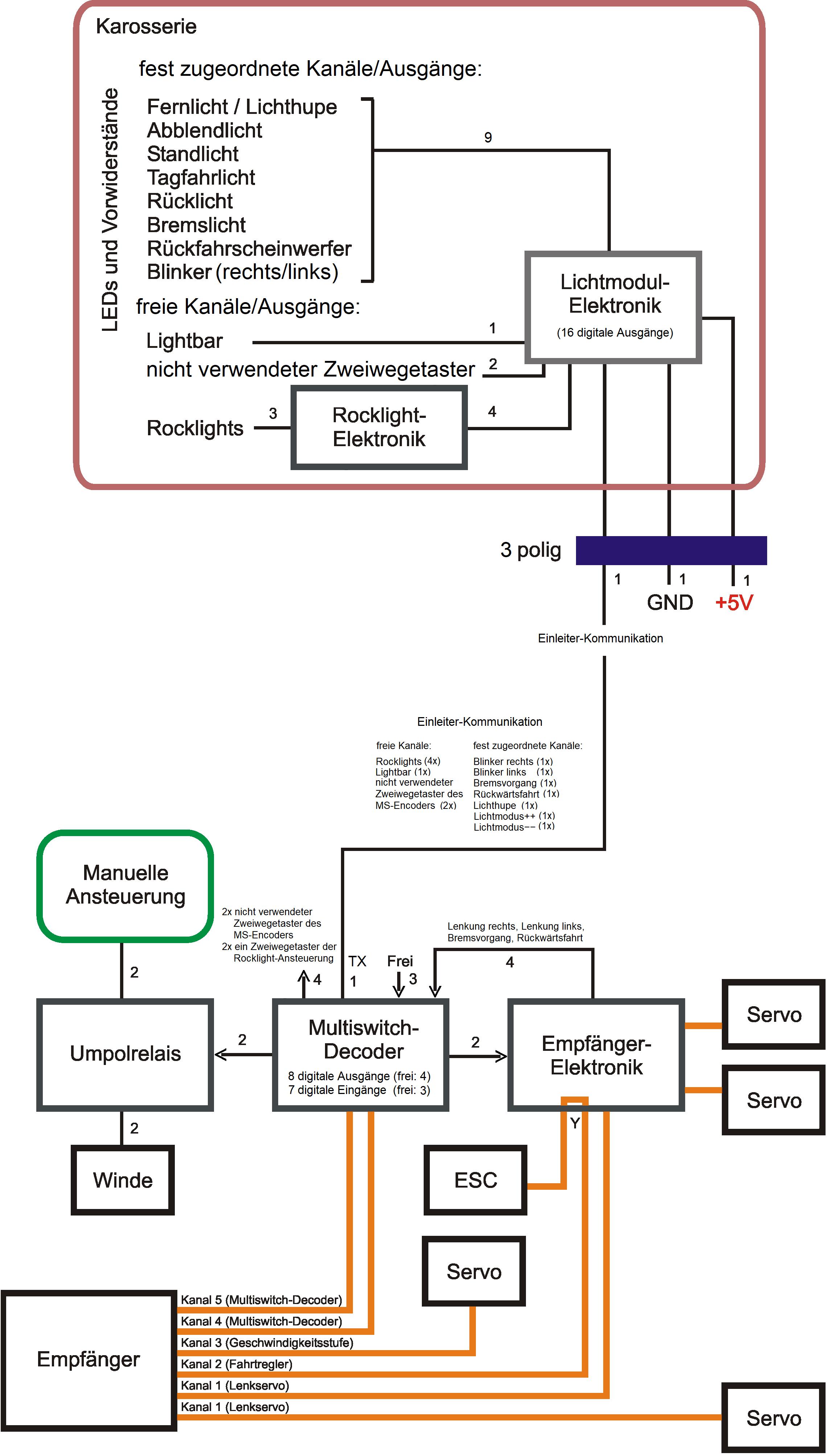
Strukturplan - Version 2 - der Signalverkabelung (die orangenen Verbindungen sind Servokabel)
Bild der MS-Decoders - Version 2:
(mit Drahtbrücken um die digitalen Eingänge und den Kommunikationsausgang über die dreipoligen Stiftleisten anschließen zu können)
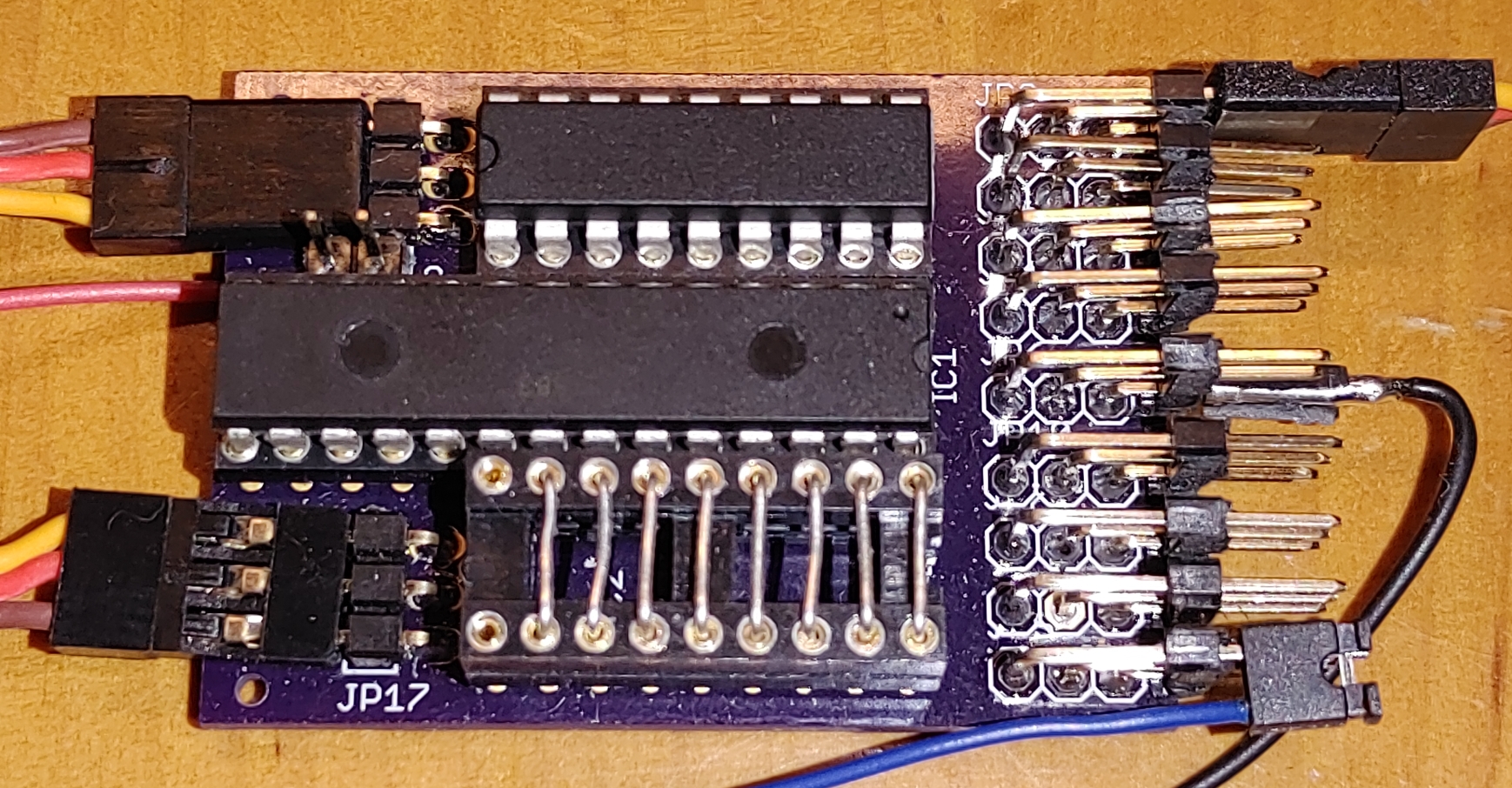
Bild der Lichtmodul-Elektronik - Version 2:
(mit Kontroll-LEDs)